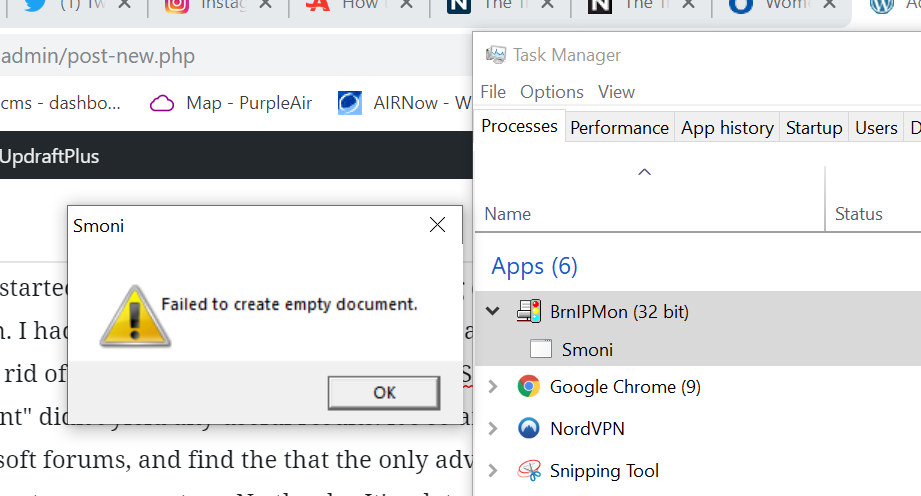
At some point in the past several months, probably after a Windows 10 update, my PC started to display a cryptic and annoying dialog box every time I logged in. I started wondering if somehow, a virus had gotten into my computer. I hadn’t spent the time to figure out what it was causing it, and how to get rid of it, until today. A google search of “Smoni Failed to create empty document” didn’t yield any useful results. It’s so annoying to go through Microsoft forums, and find the that the only advice they can give you is reset or restore your system. No thanks. It’s a lot easier to spend a little time troubleshooting on my own, than spending hours backing up and reloading all my programs and files.
I pulled up the Task Manager, scanned the running process list, and quickly found the culprit:
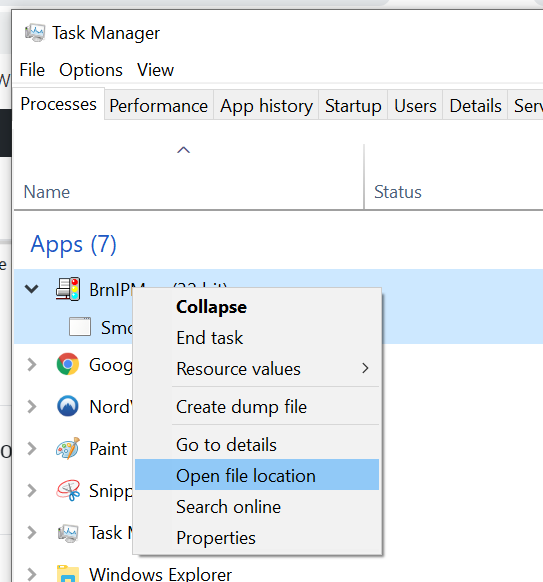
Aha! What’s this BrnlPMon process? Simply right click on BrnlPMon, and select Open File Location from the menu:
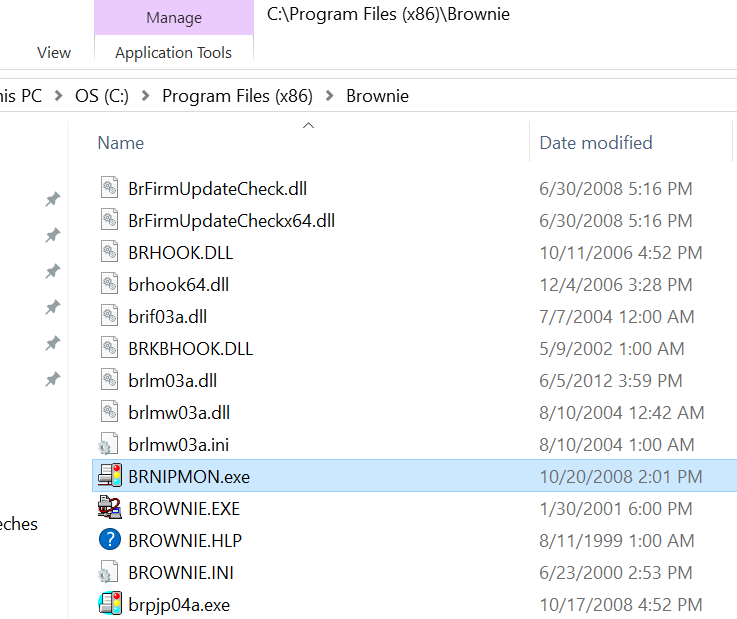
Windows then pops up a File Explorer window, with the offending file highlighted:
Hmm.. so what’s BRNIPMON.exe? Right click the file, and select Properties from the context menu. Select the Details tab on the resultant pop-up window:
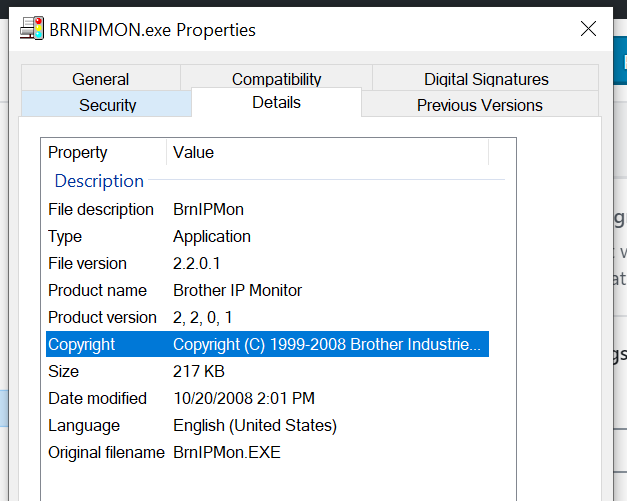
Bingo! It’s Brother IP Monitor, which I figured out is monitoring software for my Brother WiFi connected laser printer. Something in my recent Windows 10 updates (probably the new Creator’s Edition), caused an incompatibility, which triggers this stupid error dialog.
At this point, I could just uninstall it or delete the files, but since I now know that it isn’t malicious, I’ll just leave it for now, and look for a software update when I have time, and see if that fixes the issue.
Typically, OpenEVSE firmwares are flashed into the board using a hardware programmer, such as a USBasp. In the past, this was required, because the firmware had grown so large that there was no space left in the ATMega328P‘s flash to fit in a bootloader. However, the latest versions of the AVR tools that come with Arduino have shrunken down the binaries to the point that we now have space for a bootloader. Once the bootloader is installed, OpenEVSE can be programmed in exactly the same fashion as an Arduino Pro Mini, via a USB->TTL UART adapter, such as a FTDI cable, using the stk500 (arduino) protocol.
Before we can program the chip with a bootloader, we need to make a minor hardware mod. After a reset, the bootloader waits to see if a new firmware wants to be flashed before proceeding with booting the installed firmware. It is only during this very small time window that the ATMega328P‘s MCU is ready to accept a firmware. In order to trigger a reset via software, we need to connect the DTR pin of the FTDI cable to the RESET pin of the MCU via a .1uF capacitor.
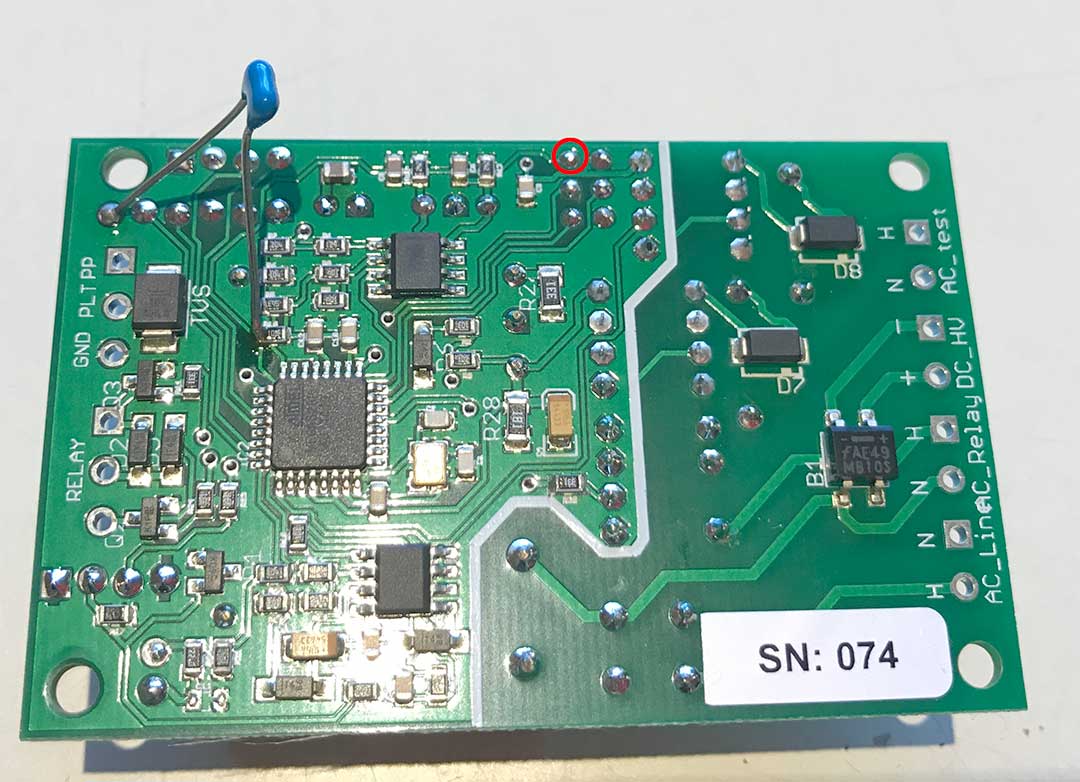
Below is a photo of the mod, done on a Wattzilla C3 board, which is an OpenEVSE variant:
The DTR pin is on the far left of the 6-pin serial connector. The RESET pin can be accessed at either the left side of R10, as pictured above, or at Pin 5 of the ISP connector (red circle).
Once the hardware mod is in place, we must set the fuses to use a bootloader, and flash in the bootloader, using a hardware programmer. In this example, we will use OptiBoot, because it’s smaller and faster (115200 baud) than the standard Arduino bootloader.
Substitute your FTDI cable’s virtual serial port for COM5 above.
For those who are not comfortable with command lines, it’s also possible to use the Arduino IDE to burn the bootloader, and flash in firmwares.
Set your board to Arduino UNO by using the menu to navigate to Tools->Board->Arduino UNO
Select your hardware programmer via Tools->Programmer
Install the bootloader via Tools->Burn Bootloader
Disconnect the hardware programmer, and use Tools->Port to select your FTDI cable’s virtual serial port.
Thereafter, you may flash in your sketches with the upload button. The above procedure will also work with any DIY or other Arduino clone which is not wired for a bootloader. Note that the bootloader takes up 512 bytes, so your maximum sketch size drops from 32768 to 32256 bytes.
I’m running some server software in a virtual machine running Debian 8 which is running under VMware on a Windows 8.1 host. While it’s easy to access the server through VMware’s virtual NAT from the host computer, it isn’t at all clear how to access it from outside the Windows host. There are two ways to accomplish this feat:
configure VMware to set the Network type from NAT to Bridged (easy)
keep the NAT and forward the VM’s port to the host, and then open a port in the host’s firewall (hard)
So which method is better? (1) is easier, because when you configure your VM’s network to bridged, the VM will get its own IP address on your LAN, and will be fully visible on your LAN, just like your real computers. (2) is more secure, because you only expose the ports that you need to the LAN, so you don’t have to configure the firewall in the VM’s client OS.
For our example, let’s walk through how to remotely access an apache server running in our VMware VM, listening at port 8080. First, let’s find the IP address of our VMware VM. Since my VM is running Debian, we simply run ifconfig:
From the output of ifconfig, we can see that our VM’s IP address is 192.168.88.144 on VMware’s virtual NAT. My Windows host, we can get our IP numbers from ipconfig:
C:\Program Files (x86)\Microsoft Visual Studio 8\VC>ipconfig
Windows IP Configuration
Wireless LAN adapter Wi-Fi:
The output of ipconfig shows that on my LAN, my Windows host has IP number 192.168.1.115, and on VMware’s NAT, its IP number is 192.168.88.1. To test access to our apache server from within the Windows host, we an simply open a web browser, and point it to http://192.168.88.144:8080. Next, let’s configure things so that we can access the server from any host on our LAN.
1. Network Bridging (Easy Way)
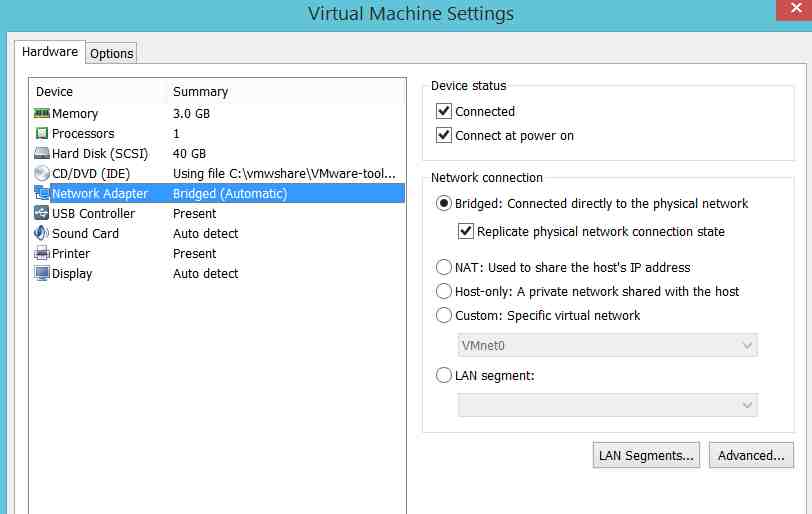
To switch our VM from NAT to Bridge mode, simply go to VMware’s main menu and select VM -> Settings... A Virtual Machine Settings dialog will pop up. In the left side of the dialog, select Network Adapter, and then on the right side of the dialog, under Network connection, change the setting from NAT to Bridged:
After you reboot your VM, it will obtain an IP number from your LAN. My VM came up with IP number 192.168.1.111, so apache is accessed via http://192.168.1.111:8080.
2. Port Forwarding (hard way)
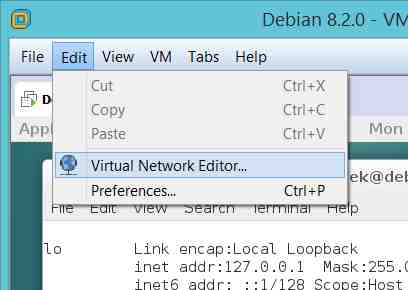
Now, let’s see how to do it while keeping the NAT. In the Virtual Machine Settings above, make sure NAT is selected. If you change the setting, make sure to reboot your VM afterwards. The first thing we need to do is forward the port from our VM to the host. From VMware’s menu, select Edit -> Virtual Network Editor…
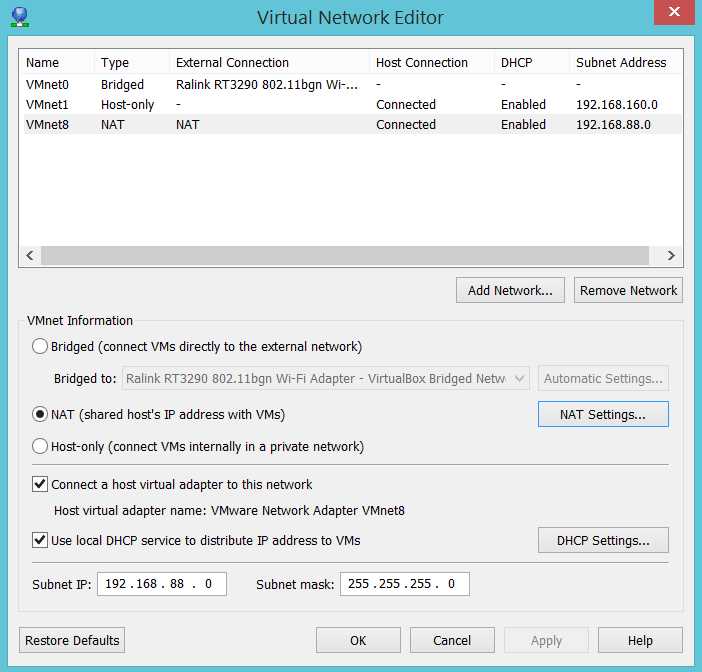
(Note, VMware Player, unlike VMware Workstation, doesn’t come with vmnetcfg.exe, the Virtual Network Editor. You can follow instructions here to access it: DOWNLOAD VMNETCFG.EXE & VMNETCFGLIB.DLL FOR VMWARE PLAYER). In the Virtual Network Editor, click the Change Settings button near the right bottom of the main dialog. In the next dialog, select the NAT from the listbox, and then click the NAT Settings… button:
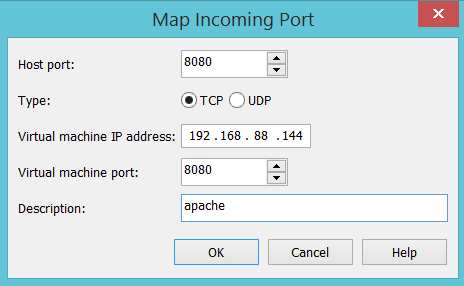
Next, in the Nat Settings dialog, click the Add… button, and fill in the info for your server’s port:
Host port: the port number you want to use to access the server … can be different from the actual port used in the VM if you like Type: select TCP or UDP Virtual machine IP address: the VM’s IP on the NAT Virtual Machine port: the port number used by the server inside the VM Description: arbitrary info
Finally, click the OK button to save your port mapping. At this point, the port forward is functional, but most likely, your have a firewall running on your host computer. You must open up a hole in your firewall for the Host port you selected above.
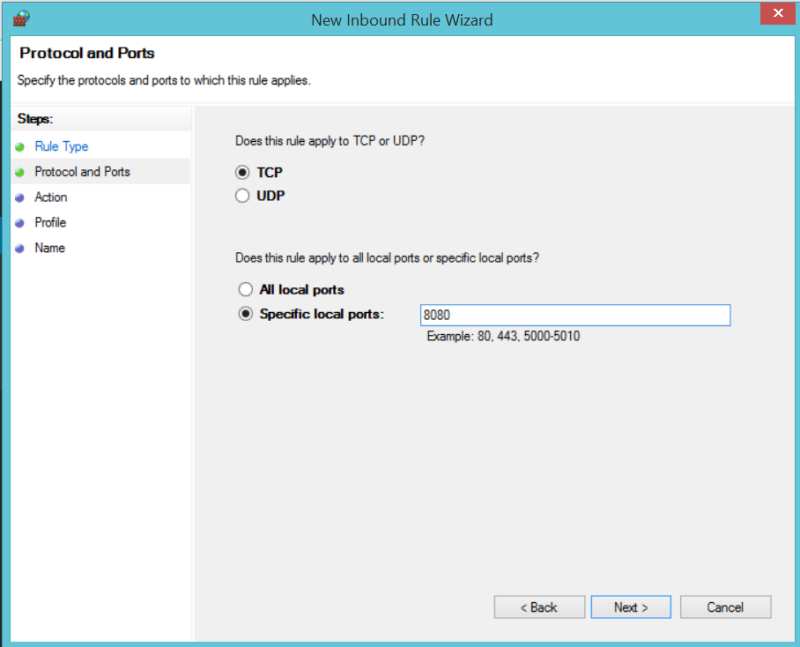
In a Windows 8.1 host, if you’re using the built-in Windows Firewall, run WF.msc. Select Inbound rules -> New Rule…. Under What type of rule would you like to create?, select Port – rule that controls connections for a TCP or UDP port. From the New Inbound Rule Wizard, select your protocol and port(s):
In the next dialog, select Allow the connection. Finally, you can decide where you want to rule to apply, Domain/Private/Public. Unless you’re planning to use the server while travelling, it is best to leave Public unchecked. Finally, you’ll be presented with a page to enter a name and description for the mapping. After you click the Finish button, you should be able to access your server from any host on your LAN. In our example, a web browser should work when pointed to http://192.168.115:8080.
I’m working on an application where I need fine adjustment of PWM frequency. The existing PWM code that I found, such as the Arduino PWM Frequency Library, only allows integral frequencies to be selected. On pins supported by 16-bit timers, the Arduino PWM Frequency Library allows fine adjustment of duty cycle, but not frequency. After searching for a while, I found an interesting article in Udo Klein’s Blinkenlight blog: Flexible Sweep. In the article, Klein has an Arduino sketch which sweeps the LEDs of a Blinkenlight board from 0-999.9999 Hz in increments of .0001 Hz.
I hacked his sketch into PrecisionPWM, which outputs PWM to any arbitrary digital pin in increments of .0001 Hz. What’s nice is that since it doesn’t use the ATmega’s internal PWM generator, you can use it on any arbitrary digital pin, whether or not it supports hardware PWM.
AVRDUDE has a little-known command line parameter, -B, which sets the bitclock, and can dramatically speed up writing/reading firmware to/from an AVR MCU when using a USBasp or USBtinyISP. For a USBasp, simply add -B0.5 to your command line parameters. Example:
In my tests, adding -B0.5 reduces the time to write & verify a hex file by about 2/3! For the USBtinyISP, add -B1 to your command line parameters. Example:
The speedup is even more dramatic with the USBtinyISP. In a specific test, I found that write/verify time dropped from 59 sec to 17 sec!
You can also speed up programming from the Arduino GUI. Simply edit your programmers.txt file. In older versions of Arduino, it can be found in <ArduinoFolder>/hardware/arduino/avr/boards.txt. For Arduino 1.8.x, it’s located in C:\Users\<YourUserName>\AppData\Local\Arduino15\packages\arduino\hardware\avr\<version>\programmers.txt.
For the USBasp, add the -B0.5 parameter to the usbasp.program.extra_params line:
usbasp.program.extra_params=-Pusb -B0.5
In order to realize the speed gain in programming, the USBasp must have firmware which supports the setting of SCK. If AVRDUDE gives you this warning:
avrdude: warning: cannot set sck period. please check for usbasp firmware update.
For wireless control of WS2812B (NeoPixel) LEDs, I initially played with Bluetooth SPP (Serial Port Profile), due to the simplicity of setting up the host software… from the host’s software’s point of view, the connection just looks like a physical serial port. Unfortunately, the flakiness of my Windows 8.1 PCs’ Bluetooth SPP support caused me to abandon that solution.
WIFI CONTROLLER HARDWARE
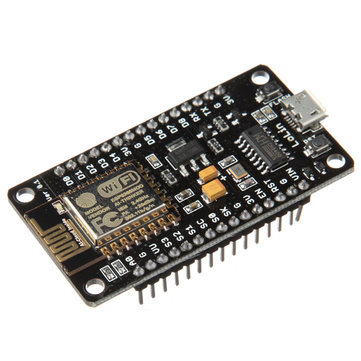
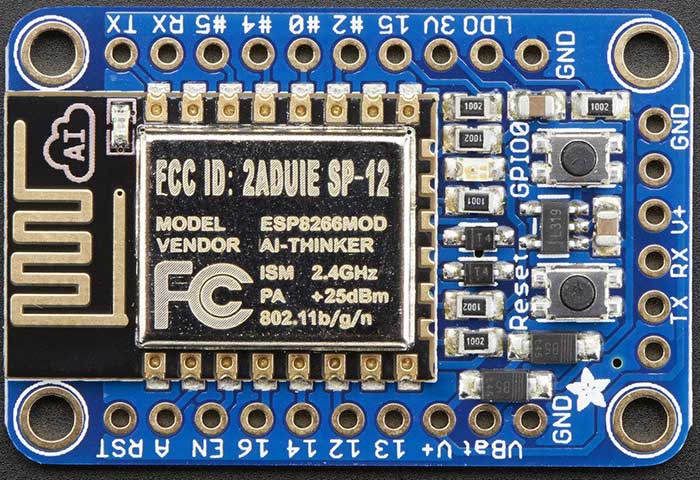
ESP8266 modules provide a very low cost method of interfacing WS2812Bs to WiFi. Adafruit’s Huzzah module costs $9.95, but on eBay, NodeMCU clones, such as the LoLin NodeMCU board can be had for ~$3 shipped from China. This makes it even cheaper than the Arduino/Bluetooth combination!
What’s more, the LoLin board has a CH340G onboard, so it doesn’t require a FTDI cable to connect it to your host computer for programming. I ordered a few of the LoLin boards, but in the meantime, I started playing with the Adafruit Huzzah boards I had on hand.
With the addition of ESP8266 support via the Board Manager, Arduino becomes an easy to use platform for code development. Also, there are easily obtainable libraries for both WiFi configuration and control of the WS2812Bs.
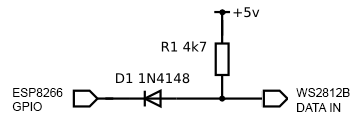
One extra complexity of using an ESP8266 to control WS2812Bs is that the ESP8266 is a 3.3V device, while the WS2812B is a 5V device, (usually) necessitating level shifting. The WS2812B datasheet shows a threshold of >= 0.7VDD for logic HIGH, and <= 0.3VDD for logic LOW. The allowed VDD ranges from +3.5-5.3V. Interestingly, some WS2812Bs can actually work when powered by 3.3V, and driven by 3.3V logic, even though it’s out of spec, but many cannot. On the other hand, it’s totally within spec to be powered by 3.7V and driven by 3.3V logic. So, if you use a 3.7V LiPo battery to power the WS2812B strand, the WS2812B data line can be connected directly to the ESP8266 without any level shifting! If you choose to go this route, power the Huzzah from its VBat terminal, so that the 3.7V will be regulated down to 3.3V to power the ESP8266. More details are available in Adafruit’s NeoPixel Uber Guide.
Since I want to be able to drive long strands of LEDs, I elected to go the 5V power with level shifter route. Also, I have lots of 5V power supplies laying around. There are many different ways to do level shifting, either passive or active. The WS2812B has tight timing requirements, and runs at 800KHz, so care has to be taken in order to avoid signal distortion. One of the most reliable methods is to use a 74AHCT125 level shifter IC. I decided to first try a simple diode and pullup resistor circuit (credit: RPi GPIO Interface Circuits):
The circuit is currently working flawlessly for me, driving my 5m long strand of 150 LEDs.
WIFI COMMUNICATION PROTOCOL
In order to send data to our WS2812Bs over WiFi, we need some sort of IP protocol. Art-Net is a royalty-free protocol, which sends DMX data embedded in UDP packets. I decided to go with Art-Net because it is an industry standard that is supported by a variety of Pro software, and Jinx! and Glediator can talk to it.
ARDUINO FIRMWARE
I will not go into how to set up Arduino to compile sketches for the ESP8266, as that is discussed elsewhere. To compile for the Huzzah, select it as the compile target from the Tools pulldown menu:
Tools -> Board -> Adafruit HUZZAH ESP8266
I created a sketch, which is a mashup of a few different projects from github. The code is in my github repo: WS2812ArtNet. I stripped the Adafruit NeoPixel library down to the bare metal, and added a captive portal for configuring the WiFi connection. Also, it supports a hardware pin to erase the WiFi settings. Configuration is done via a few defines in WS2812ArtNet.ino. See the #defines for PIXEL_CNT, PIN_DATA, PIN_LED, and PIN_FACTORY_RESET. At a minimum, PIXEL_CNT must be set to the number of LEDs in your strand.
PIN_DATA is used to select the pin that’s used to drive the data to the LED strand.
PIN_LED is used to select the a pin which blinks an LED every time an Art-Net packet is received. This makes it easy to tell if the board is receiving data. In addition, the LED is initially off at boot-up, and turns solid red when the ESP8266 connects successfully to a WiFi AP. By default, PIN_LED = 0, which makes it control the onboard red LED on the Huzzah.
PIN_FACTORY_RESET wipes out any saved settings and clears the EEPROM when it’s grounded for 2 sec.
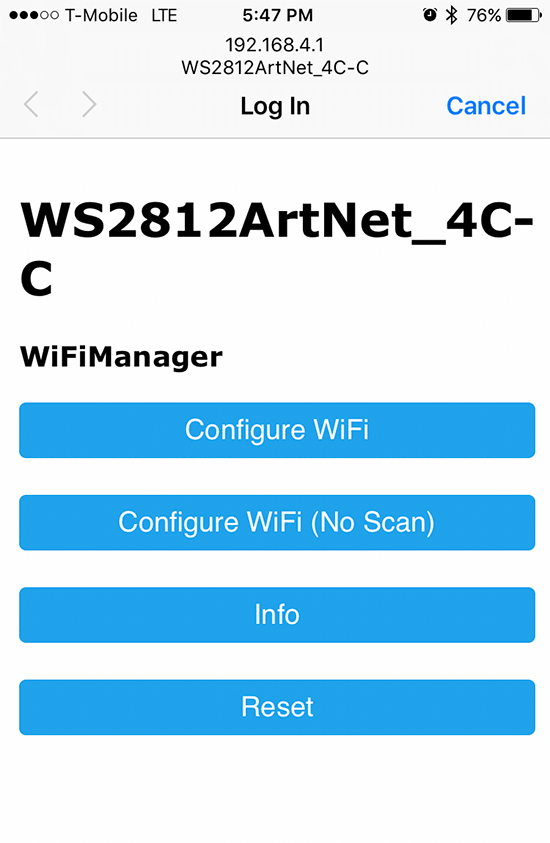
To load the WS2812ArtNet sketch into the ESP8266, first press the GPIO0 and Reset buttons simultaneously, and then let go of the Reset button. The red LED will then glow dimly, indicating that the bootloader is active. Once the sketch is loaded, when the ESP8266 initially boots up, it will create a WiFi AP with SSID WS2812ArtNet_hh-h. Use a computer, phone, etc to connect to the AP. Upon connection, it should automatically present a captive portal for configuration:
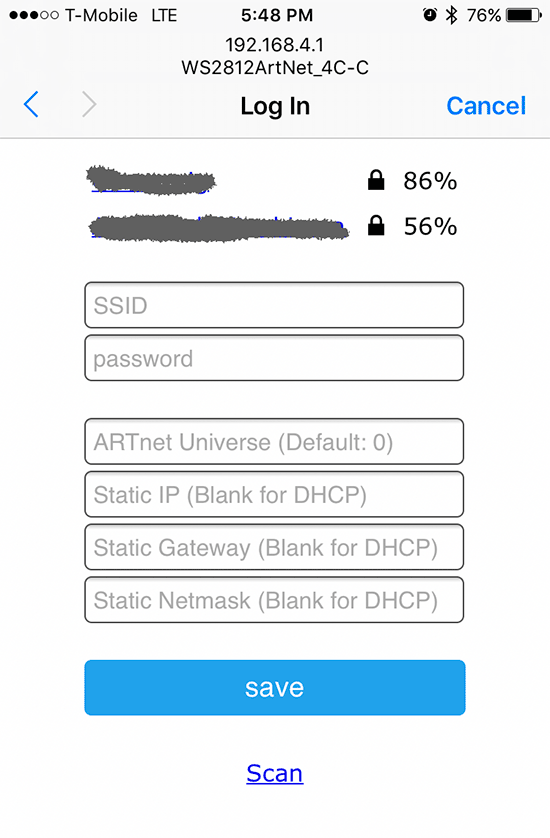
If the captive portal doesn’t automatically launch, open a web browser, and point it to http://192.168.4.1. Tap on Configure WiFi, and the ESP8266 will automatically scan for available APs:
Tap the desired AP’s SSID, and type in the passphrase. Additionally, you can also choose a starting Art-Net universe, and configure a static IP. After you tap save, the ESP8266 will reboot. If it connects successfully to your AP, the onboard red LED will light. Then, the LED strand will go into the startup test sequence of lighting up red, green, and blue, and then turning off. Once Art-Net data is received, the LED still start blinking with every packet it receives. If you have trouble during setup, you can see debug messages by opening the ESP8266’s serial port in a terminal set to 115200,N,8,1.
When configuring Jinx!/Glediator, select GRB as the pixel data format.
I’ve been laying the groundwork for doing some projects using remote controlled RGB LEDs. My first attempt was Lampduino, which used discrete RGB LEDs, and an ITEAD Colorduino as a controller. In that project, I ran into several pitfalls:
though inexpensive, assembly of the LED matrix was very labor intensive
the LED’s were rather dim, due to the limited drive capability of the Colorduino
the frame rate was slow, due to limited baud rate and RAM
while it was scalable, I didn’t like the idea of having to use a separate Colorduino for every 64 LEDs
A few years have passed, and WS2812B LEDs have dropped enough in price enough to get into the range that I feel is affordable. They can be found on eBay and AliExpress very cheaply. Also, they can be controlled without any specialized hardware – all that is needed is one GPIO pin. There are libraries available for many of the popular microcontrollers. Some examples are Arduino, ESP8266, Teensy 3.x, and Raspberry Pi.
HOST SOFTWARE
The other piece of the puzzle is control software. For Lampduino, I hacked uRaNGaTaNG’s mtXcontrol Processing sketch into rgbMtx, but I found Processing to be a very limiting platform, which was hard to debug. This time around, I found a couple of interesting free LED control programs, which are both quite powerful. The first one is Jinx! LED Matrix Control, which runs on Windows only, and the second is Glediator, which is a Java app. Both programs, while free, are not open source. However, they are both powerful enough to do some interesting things.
HARDWARE
I decided to start my experiments with an Arduino Pro Mini clone, because they have a tiny footprint, are cheap (clones are <$2 shipped from China on eBay), and I happened to have some laying around. Also, the Arduino Pro Mini’s ATmega 328P MCU runs at 5V, so no level shifting is required when interfacing to WS2812Bs. Glediator’s creator, Solderlab, has barebones, fast serial client Arduino sketch which can be downloaded at: WS2812-Glediator-Interface. It can run on any 8-bit ATmega-based Arduino such as the Mega, UNO, Deumilanove, etc. The code that outputs the data to the LEDs is written in assembly language, and is thus, very fast & compact. Also, rather than using Arduino’s Serial library, it contains its own very compact serial code. At the expense of a little bit of speed, I decided to generalize it a bit, and add my own packet protocol. My code is on github at: WS2812Remote. The main changes that I made in my version of the code are:
Since I didn’t understand the Glediator example’s serial code, I reverted to using Arduino’s built-in Serial library. I’ve tested it with baud rates up to 1000000 and an FTDI cable on a Windows PC, and it works fine
I added support for my own packet protocol. Glediator’s serial protocol is extremely simple. Each frame starts with 0x01, followed by the pixel data stream. My simple packet protocol adds an XOR check byte, as well as a few simple commands such as color fill and blanking of the LEDs.
I also wrote a C++ program, called pkt_test, which demonstrates usage of my packet protocol.
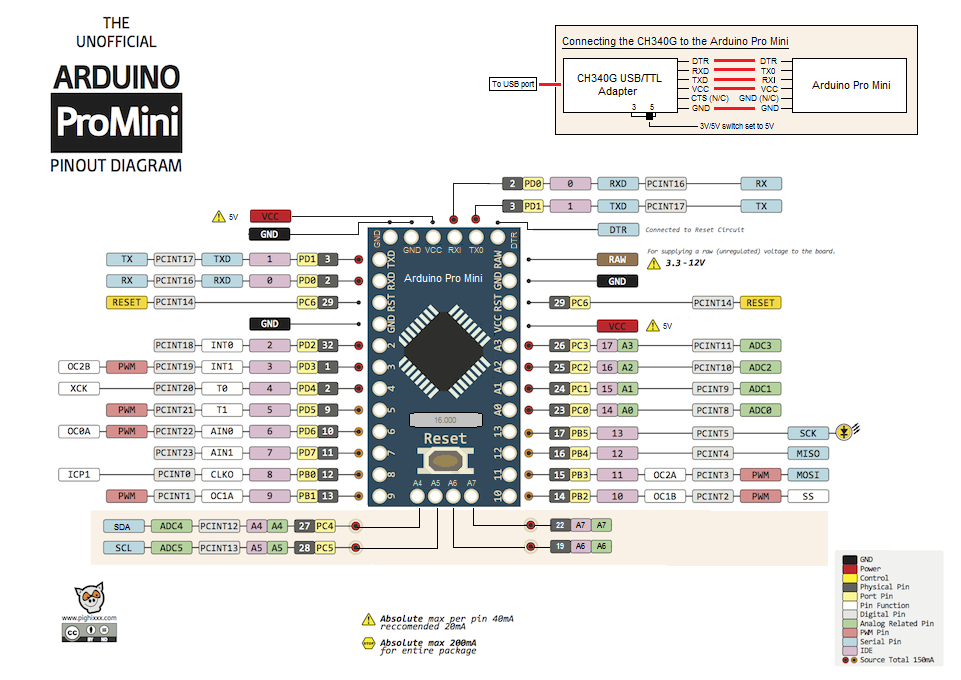
Hookup of the WS2812B LED strand to the Arduino is quite simple. You can use any 8-bit Arduino. First, you must select a data pin to drive the strand. I arbitrarily decided to use pin PD2. For speed and compactness, instead of using Arduino functions to access the data pin, the code refers to the ATmega port and pin numbers, rather than Arduino’s rather arbitrary digital pin numbers. On the Arduino Pro Mini, digital pin 2 = PD2, as can be seen from the following pin mapping diagram:
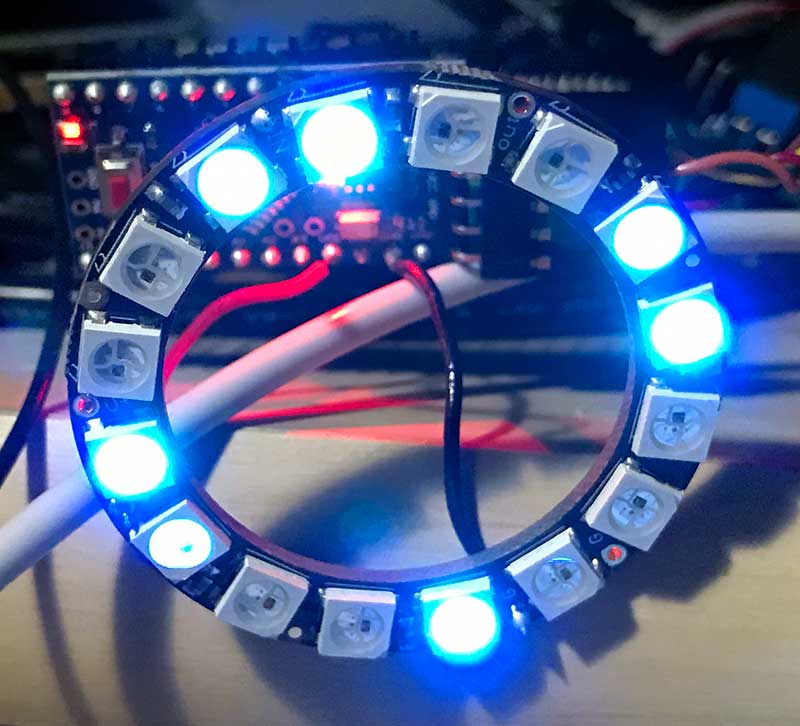
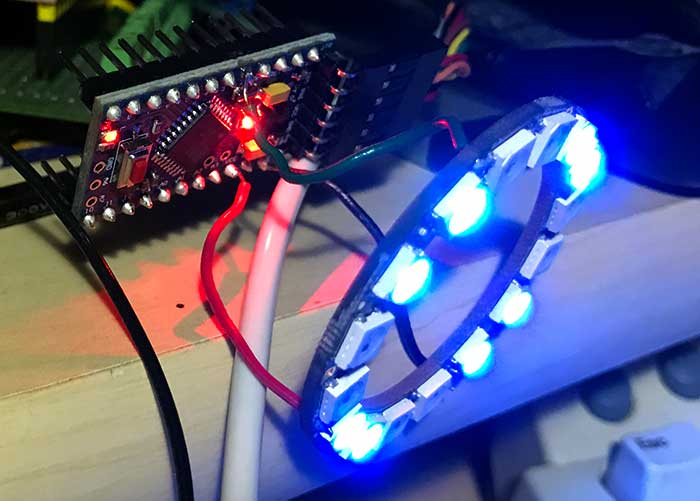
Next, PIXEL_CNT needs to be set to the number of LEDs in your strand. I tested with an Adafruit NeoPixel ring containing 16 LEDs:
#define PIXEL_CNT 16
Connect your the data input pin of the first LED of your WS2812B strand to your selected data pin. Adafruit recommends a 300-500 ohm inline resistor to protect from voltage spikes. The NeoPixel ring I used already has a resistor onboard, so I didn’t need it. I connected the +5V and GND pins directly to the corresponding pins on the Arduino. To protect against current inrush when powering it up, Adafruit also recommends connecting a 100uf capacitor between the +5V and GND pins. However, it’s not necessary if you’re just going to power it from USB, which is what I did, since I was only powering 16 LEDs. For large strands, you will need an external power supply to supply sufficient current, as each LED can draw up to 60mA at full brightness. If using an external power supply, make sure to always apply power to the WS2812B strand before the data pin!
HOST SOFTWARE CONFIGURATION
I used the same FTDI cable that I used for programming the Arduino as a virtual com port for sending data to it. When configuring Jinx! or Glediator, select Glediator protocol. For speed, the sketch just receives raw pixel data, and dumps it out to the LED strand, so the data format is in native GRB order.
When configuring Jinx! or Glediator, select Glediator as the device type (Jinx!) or output mode (Glediator). Make sure that the baud rate of the corresponding com port matches BAUD_RATE as defined in your sketch. I tested 115200 and 1000000 bps with my FTDI cable, and both worked fine with both programs. It failed at 1250000 bps.
If you want to play around with my packet protocol, the pkt_test code is self explanatory. I tested it with Visual Studio 2015 in Windows 8.1, and g++ in Debian linux 8.2.0. Prior to compilation, set COMM_PORT to correspond to your Arduino’s serial port. Also, confirm that BAUD_RATE in ../WS2812Remote.h matches the value that was used when loading the Arduino sketch. To compile and run pkt_test in linux, use:
My first inclination for wireless control was to use Bluetooth, due to its simplicity. The Bluetooth SPP (Serial Port Profile) makes it easy to construct a wireless virtual serial interface between a host computer and the Arduino. This allows you to use exactly the same host software configuration that you would for a direct serial connection to the host. I had an Elechouse EHB Serial Bluetooth Module in my parts bin (very similar to the ubiquitous HC-05), so I decided to try it out.
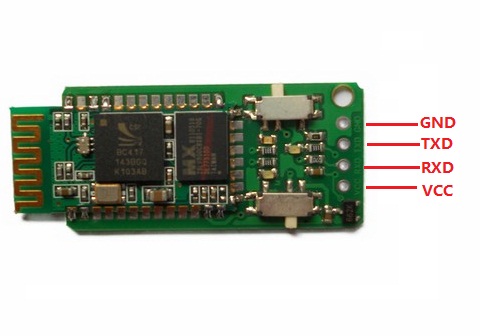
Before using the EHB module can be used, it must be configured with a series of simple AT commands. I hooked it up to my Windows PC with my FTDI cable, and used PuTTY as a serial terminal to configure it. Connecting the EHB module to the Arduino is quite straightforward:
Arduino -> EHB
5v -> VCC
GND -> GND
RXD -> TXD
TXD -> RXD
Pairing the EHB to a host computer creates a virtual serial port for the host software to access. Unfortunately, I was using Windows 8.1 as my host computer, and its handling of Bluetooth SPP clients is rather flaky. Every time I powered down the LED controller, I had to unpair/pair the Bluetooth in order to get the virtual serial port to work properly. While it worked flawlessly when the virtual serial port was functional, ultimately, I abandoned Bluetooth due to the flakiness of Windows’ Bluetooth SPP support. Perhaps Linux can handle it better.
I recently upgraded to Arduino 1.6.13, and found that I could no longer program my boards with my Chinese USBasp clone programmer. When the Arduino IDE tried to load the firmware with my USBasp, AVRDUDE couldn’t find my USBasp, and gave this error:
avrdude: error: could not find USB device with vid=0x16c0 pid=0x5dc vendor=’www.fischl.de’ product=’USBasp’
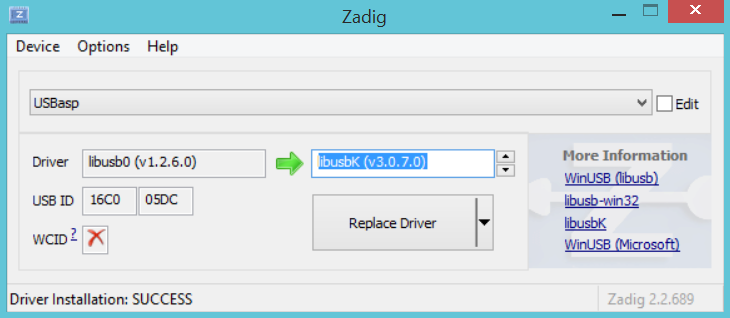
It turns out that the that AVRDUDE 6.3, which is bundled with Arduino 1.6.10+, has timing issues with USBasps. The fix is to replace your libUSB-win32 driver with libusbK v3.0.7.0. An easy way to install libusbK v3.0.7.0 is to use zadig. Download the zadig from
Launch zadig, and from the menubar, select Options->List All Devices
Next, from the top listbox, select USBasp.
From the Driver selector box, click the up or down arrow key until libusbK (v3.0.7.0) appears.
Finally, click the Replace Driver button.
The screen should look like this:
You do not have to reboot or disconnect/reconnect your USBasp. After Zadig finishes installing libusbK, AVRDUDE 6.3 will start working correctly with your USBasp.
NOTE: the version of AVRDUDE that Arduino 1.6.x uses is actually controlled by the Boards Manager (Tools->Board->Boards Manager). Even if you have a version of Arduino 1.6.x prior to 1.6.10, if your Arduino AVR Boards by Arduino is version 1.6.10+, it will use AVRDUDE 6.3.
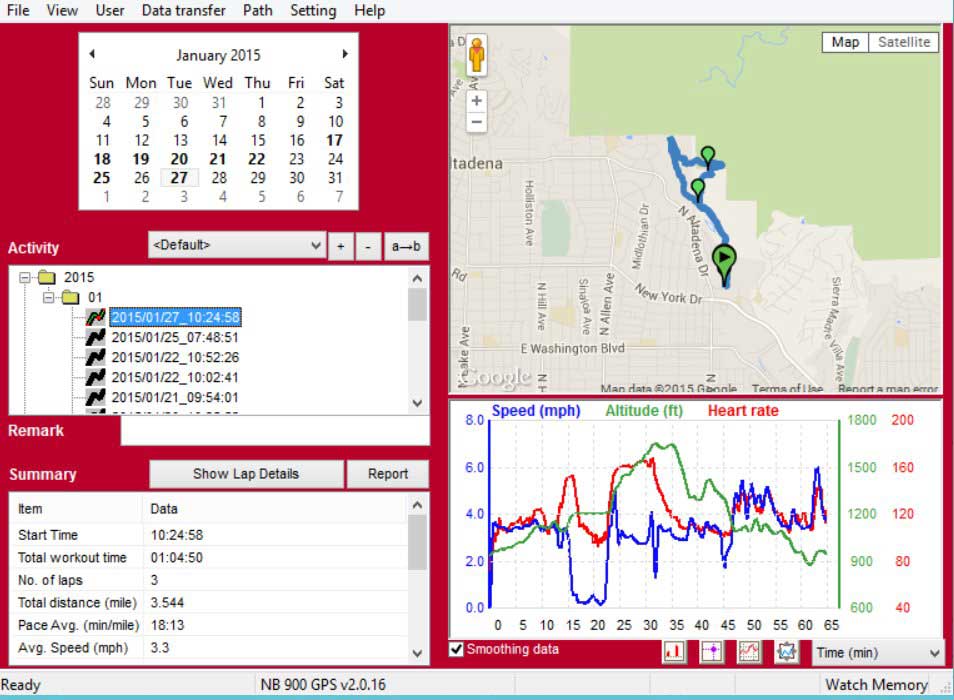
Today, I discovered that the New Balance NX990 GPS Cardio Trainer Watch, like the Pyle PSWGP405BK, is just another Latitude Limited Nav Master II clone. Following my hunch, I searched for the NX990’s accompanying software, and lo and behold, it’s just rebranded version of GPS Master! Best of all, it’s an updated version, v2.0.16.124, vs the older v1.2 version that I got from Pyle. Besides the red background, it has a much improved interface, showing a google map of your track, and a zoomable graph with user selectable data that tracks your stats live on the map.
So for instance, you can select the point on the graph where your heart rate is highest, and see where you were located on the map.
Best of all is the new Data Transfer->AGPS menu item. A-GPS (Assisted GPS) lets you use the Internet to download GPS satellite almanac data. Your GPS watch can download the almanac data directly via the satellites, but it is a very slow procedure. By connecting your watch to GPS Master once a week and downloading new AGPS data, you can get a hot GPS fix a lot faster. I wasn’t sure if my Pyle firmware had A-GPS support built in, so I took a risk, and used Setting->Watch firmware update to update my Pyle watch to the latest New Balance firmware. I’m happy so say that my watch did not get bricked! [DISCLAIMER: YMMV. I AM NOT RESPONSIBLE IF YOU DECIDE TO INSTALL THE NEW BALANCE FIRMWARE ON YOUR WATCH, AND IT TURNS INTO A PAPERWEIGHT] The New Balance v1.20 firmware appears to have all of the functions of my Pyle firmware. The most obvious difference is just that the screen fonts are more squared off looking. Some of the menus look slightly different, too. I took my watch outside after updating the AGPS data, and it got a GPS fix basically instantly!!
Another great discovery is that unlike my GPS Master 1.2, NB 990 GPS’s exported GPX track files now contain heart rate data!This means when upload your GPX track files to web sites such as RunKeeper, your heart rate data will be saved and displayed, as well. Meaning that you don’t have to use the csv2gpx/csv2tcx utilities that I wrote yesterday in order get your HRM data into other platforms.
All and all, I am very happy with both the software and firmware updates. I took my watch and HRM out for a workout today, and they worked flawlessly with the new firmware.
Crane GPS Watch Client : command line utility. Most notably, it exports TCX files, which is important if you like to use the watch with the GPS turned off, since GPX files that contain HRM data w/o GPS data aren’t valid.
kalenji-gps-watch-reader : exports a multitude of formats, including Garmin FIT. Also performs elevation corrections via Google Elevation API.
A couple of years ago, I bought a Pyle PSWGP405BK GPS watch with Heart Rate Monitor.
It’s been a great device, though it’s big, and a bit ugly. The battery far outlasts my wife’s Garmin watches, and I love the customizable screens. My main problem has been the lack of a useful way to extract heart rate data. The problem is that the GPS Master software offers only two ways to export heart rate data: 1) TKL format, which is an undocumented file format used only by GPS Master, and 2) CSV format, which isn’t compatible with any web sites or software that I use. Although GPS Master can directly export GPX files, they do not include the heart rate data.
I finally got sick of it today, and after wasting some time looking for an easy way to adapter existing converter software to work w/ GPS Master’s CSV files, I gave up, and decided to write my own programs. So, I give you csv2gpx, and csv2tcx. csv2gpx takes a GPS Master CSV file as input, and outputs a GPX file with heart rate data embedded. csv2tcx takes a GPS Master CSV file as input, and outputs a TCX file with heart rate data. Both programs have a simple command line interface. I have supplied full source code on github, so anyone can compile them to run on their own platforms. For Windows users, I have supplied EXE files. The command line syntax is quite simple:
csv2gpx workout.csv
or
csv2tcx workout.csv
The output will automatically be generated as workout.gpx and workout.tcx, respectively.
Here is a sample session:
C:\git\csv2gpx\test>csv2gpx 20150125074851.csv
Lincomatic GPS Master CSV to GPX Converter v0.2
Note that the output file is the same as the input file, but with GPX extension. csv2tcx works in a similar fashion.
I think csv2gpx and csv2tcx should work with any other watches that work with GPS Master, as well. Runtastic’s watch looks identical to my Pyle, as well as several other models that I’ve seen. For instance, the New Balance NX990 also uses GPS Master, and looks identical. As I’ve stated in a previous article, the watch is built by Latitude Limited, and the OEM calls it the Nav Master II.
Update 2015-01-27: Argh! I just confirmed that the fancy new updated version of GPS Master bundled with the New Balance NX990, aka NB 900 GPS, now exports HRM data inside its GPX files! So I wasted my time writing the utilities above yesterday! It has some nice UI enhancements, as well. Highly recommended! You can read my detailed description: Pyle PSWGP405GK Software and Firmware Updates.