UPDATE 2022-08-31: It turns out that in order to program Honda key fobs for cars w/ a push to start button (one button start), you need to be running the beta Honda module V2.01.54, which only runs on 64-bit Android phones, and which you must request from Autel (Instructions here: https://clarity-phev.github.io/Battery-Capacity-Read/AP200_Instructions.pdf). The regular Honda module only programs keys via a separate external module, which plugs into the car’s DLC port. If you aren’t able to obtain the beta Honda module, then you’re out of luck, unfortunately.
Several months ago, I misplaced one of the key fobs from my 2019 Honda Clarity. The MSRP of the fob itself is $467, and I found the OEM part online for $314. Local locksmiths all wanted $150 to program it. Outrageous.
I started searching around for cheaper sources of fobs, and found one on eBay for $22.24:

I was pleasantly surprised when I received it. It’s pretty much identical to the OEM part, except that the spot for a plastic insert in the back is empty. It even comes with a blank key, which slides out, just like the original. Next, I had to figure out how to program it. I called a bunch of locksmiths, and they all wanted $150 to program it, which is crazy. Then I remembered that I had an Autel MaxiAP200 bluetooth dongle, which I used for OBD-II diagnostics.:

It’s a steal, because it can do most of the functions that their standalone professional OBD-II units can do, but a fraction of the price. I bought mine on AliExpress for $50 from the official Autel store (the price is higher on the screenshot above). You can also find them on Amazon. Autel sells several different models of bluetooth dongle at different price points. Make sure to buy the MaxiAP200. The other models force you to pay an annual fee, while the MaxiAP200 includes a lifetime license for one vehicle make, with free updates. You can add on other makes later on, but they will need to be renewed annually. It connects to both Android an iOS phones. I will not go into how to install the app and pair the device, because you can find that info elsewhere.
Anyway, I started looking around the functions that were available in the app, and discovered that it has the capability to program key fobs! I will walk you through the easy procedure. Note: Some of the screens may be missing in the walkthrough below.. there were so many that I think I forgot one or two, but the app walks you through step-by-step. Just follow the prompts.
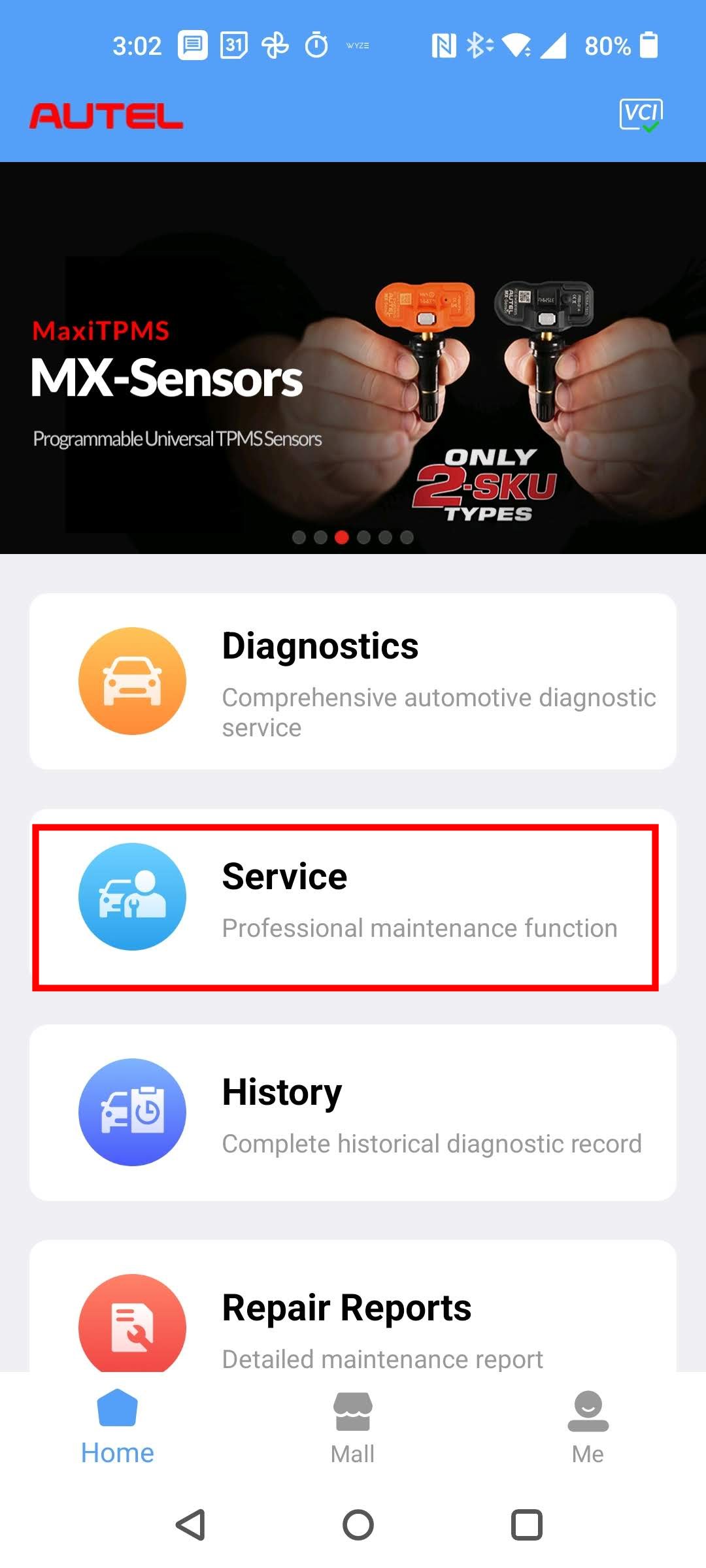
Launch the MaxiAP200 app on your phone, and select Service from the main menu.
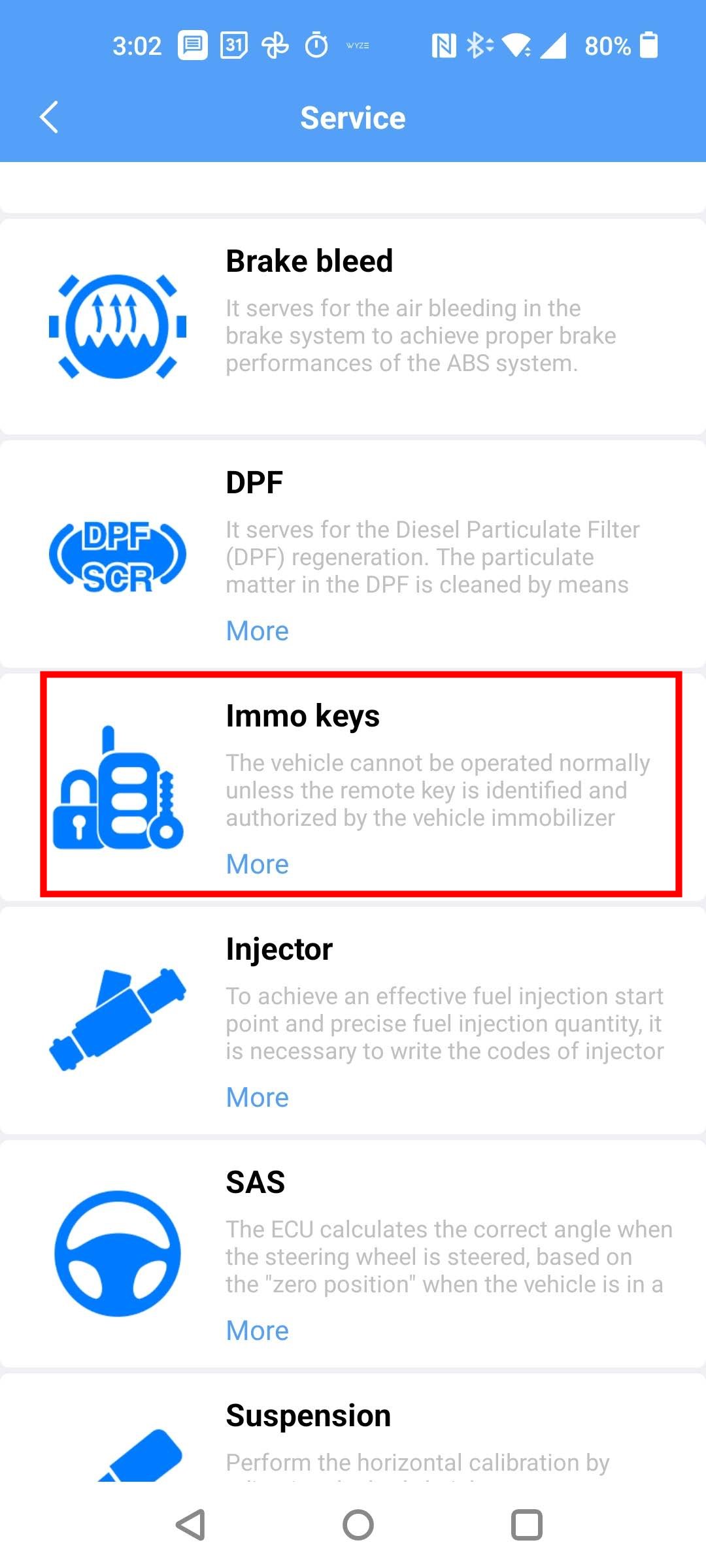
Next, select the Immo Keys module:
Then select your vehicle brand:

Next, you’ll be prompted to select the vehicle:

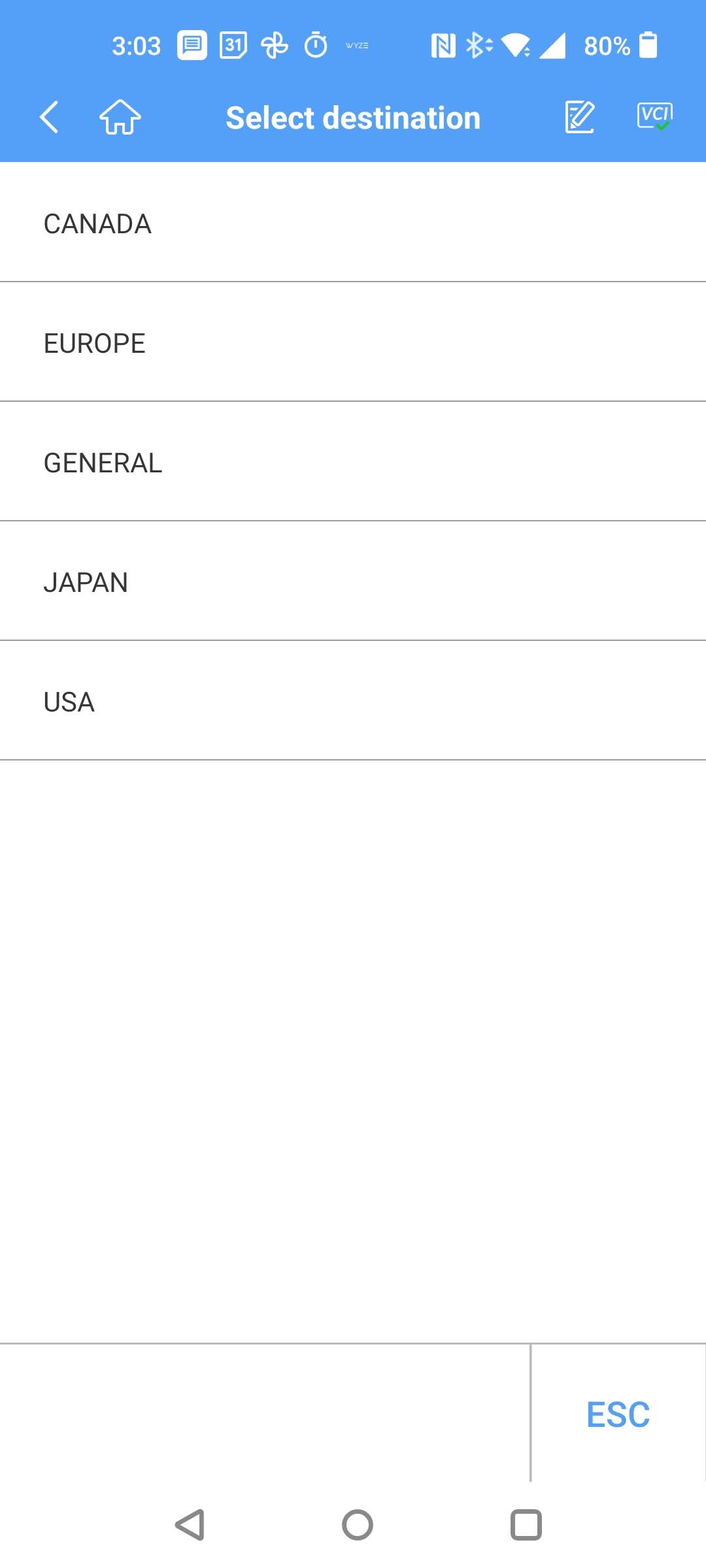
Then your vehicle’s country of sale:
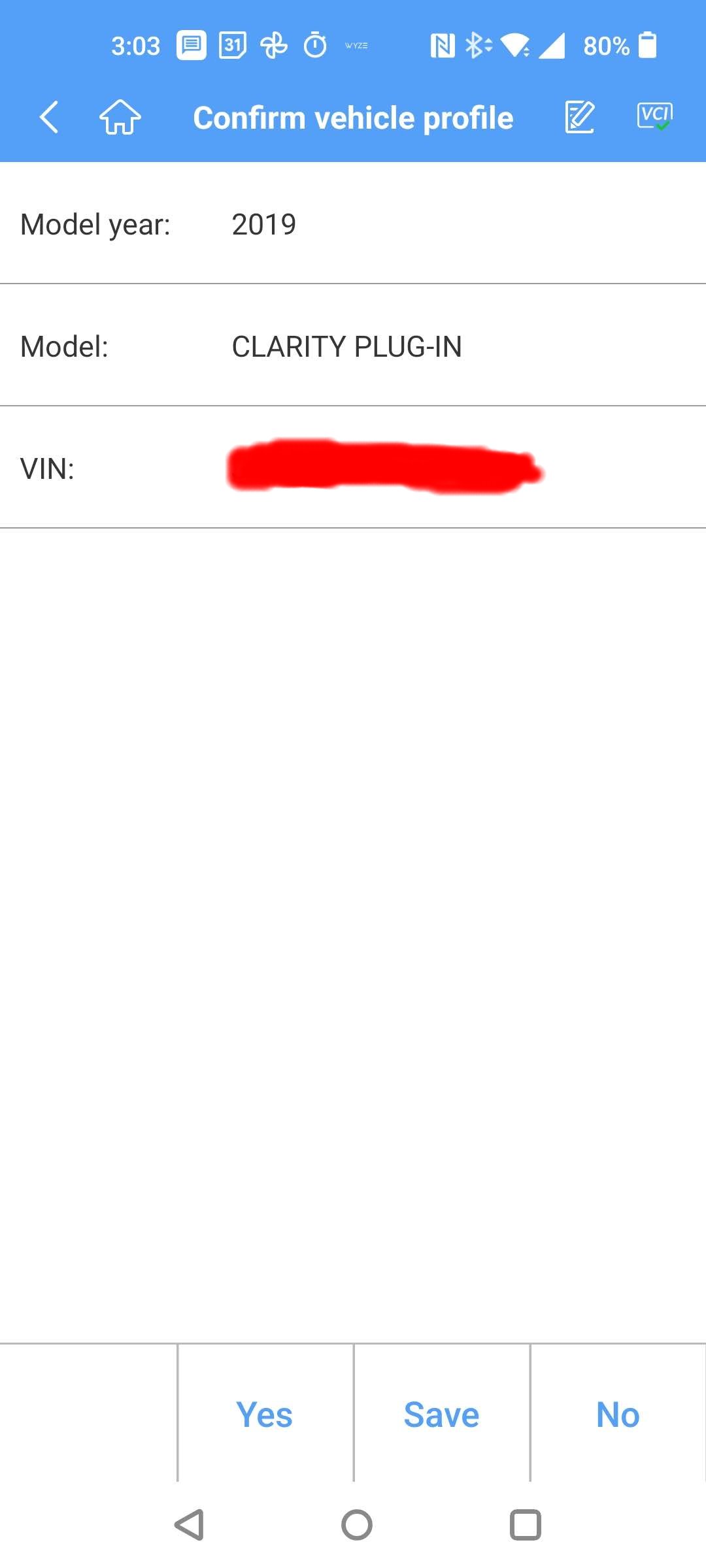
It will scan for your VIN, and then give you the following confirmation screen:
Next select Hot functions:

Tap One-push start:

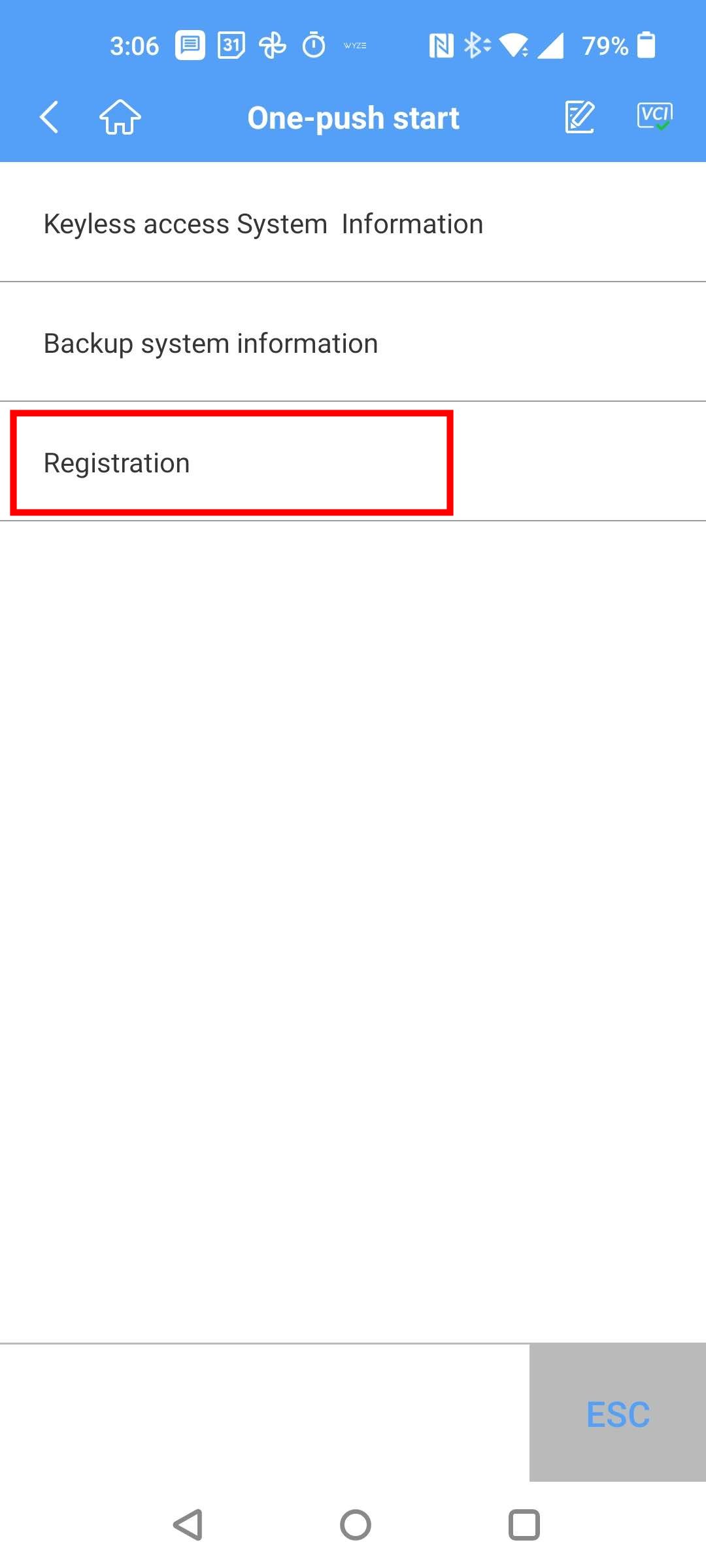
Tap Registration, which takes you to the functions for adding/removing fobs:
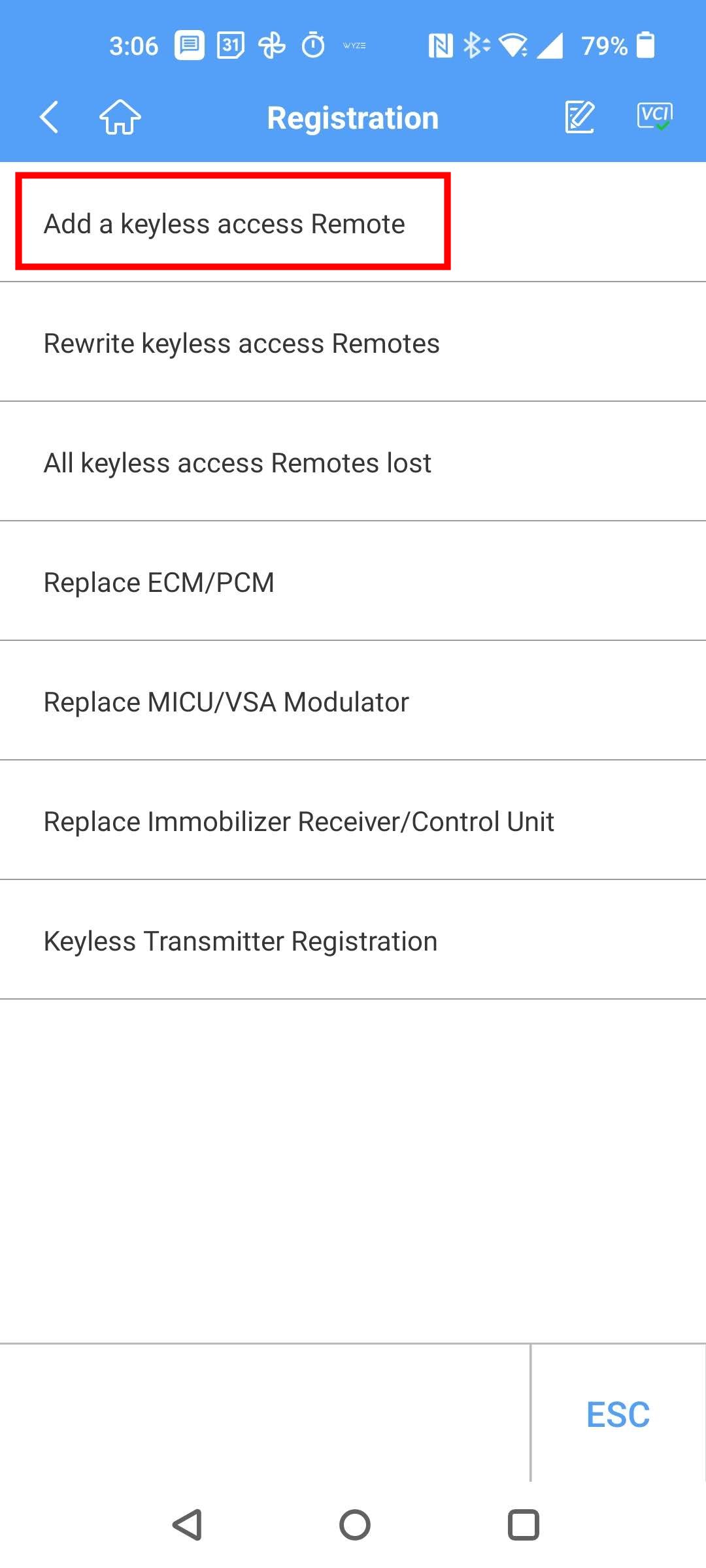
Select Add a keyless access Remote:
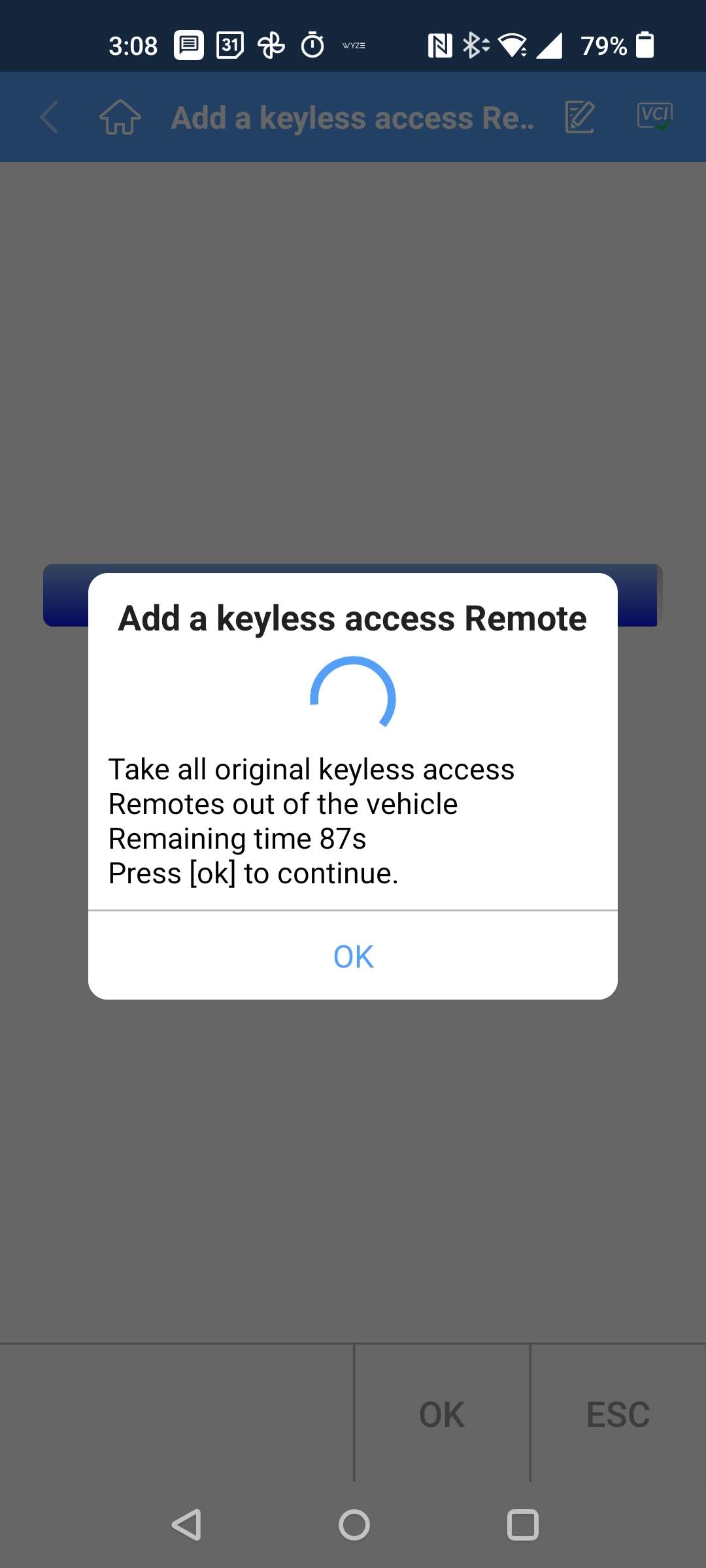
This launches you into the procedure for registering a new fob. Sorry, this is the part where I am missing some screens below. I can’t remember exactly, but it walks you through several steps.. pushing the car’s Start button w/ a working key fob in the vehicle, turning the car off, pushing the Start button w/ they fobs in and out of the car, etc. Just follow the prompts. I don’t remember the exact order. Below is one of the prompts:
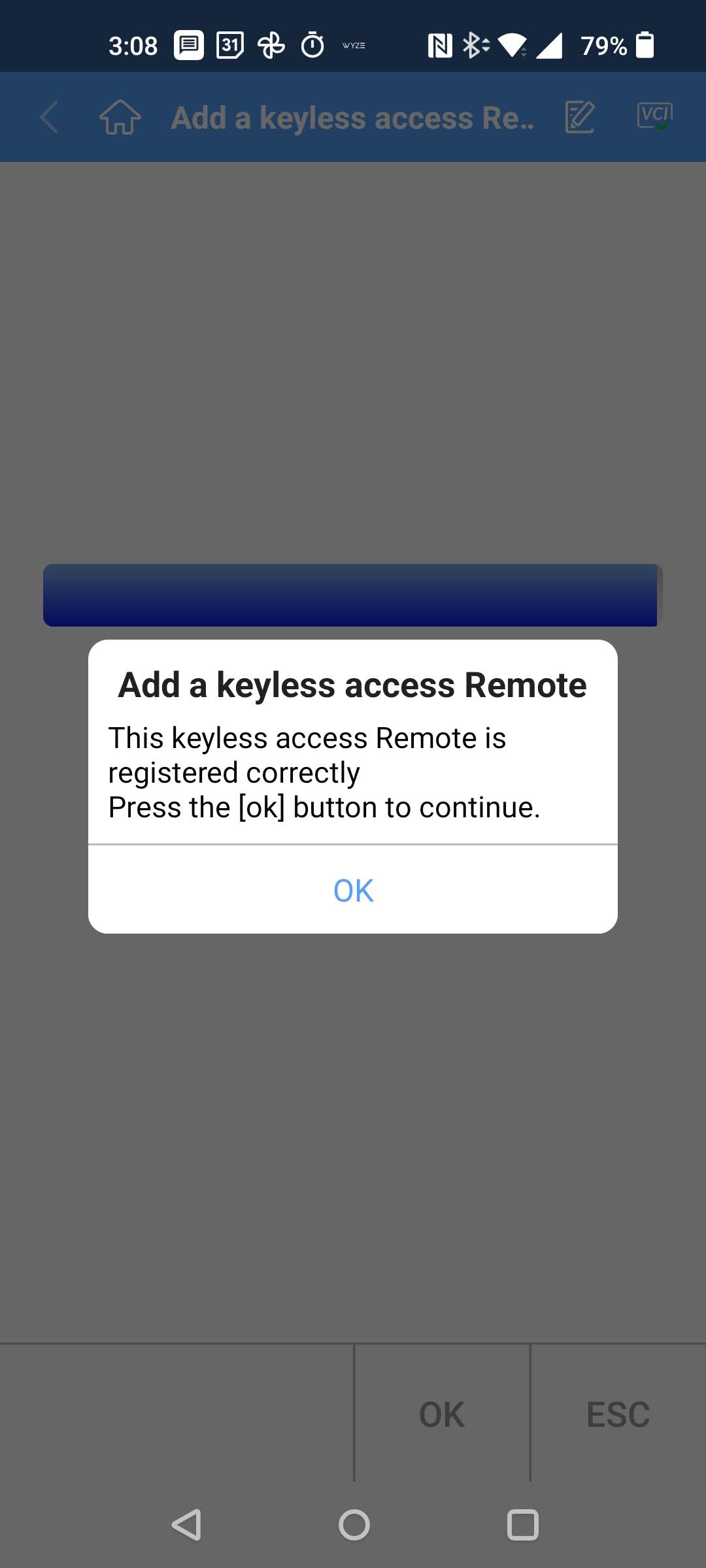
After you walk through all the steps, if you did everything correctly, you get this screen:
Now, the moment of truth! Try using your newly programmed fob to lock/unlock the doors, and start the car!